تعریف پاراشوت آسانسور
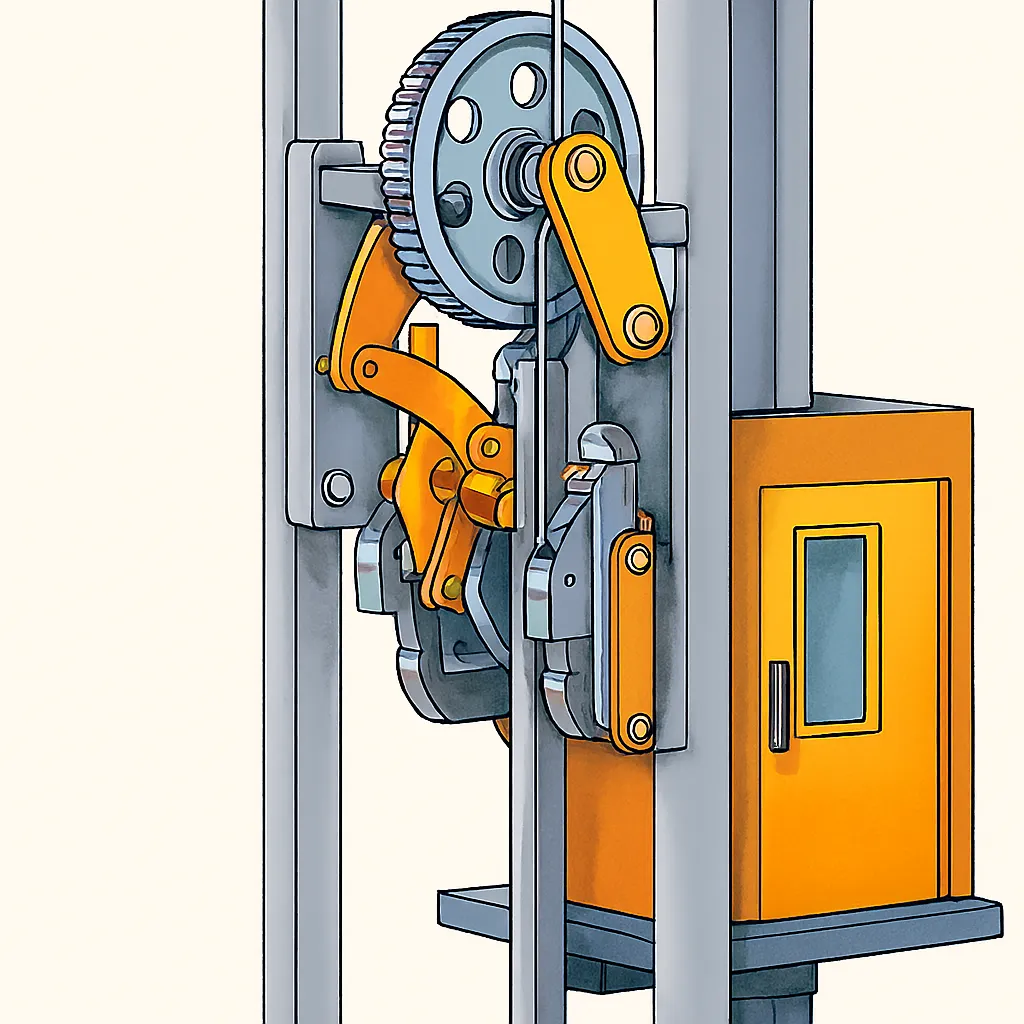
پاراشوت آسانسور چیست، که در ادبیات فنی بهعنوان «سامانه مهار اضطراری کابین و کادر وزنه» شناخته میشود، یک سازوکار ایمنی مکانیکی-الکترومکانیکی است که با اتکا به اصطکاک کنترلشده و قفلشونده، سرعت غیرمجاز را تشخیص و حرکت را در ریلهای راهنمای کابین یا کادر وزنه با توالی مشخصی مهار میکند. در معماریهای مدرن، پاراشوت بهصورت یک مجموعهی چندبخشی شامل گیرههای اصطکاکی یا قفلشونده، اهرمهای انتقال نیرو، فنرهای پیشبارگذاریشده، مکانیزمهای تعدیل ضربه، و مسیرهای بازآرایی پس از عملکرد، با گاورنر سرعت، لینکها و کنترلر ایمنی همافزا میشود تا پاسخگویی به شرایط گذرای خطرناک مانند پارگی سیمبکسل، لغزش اصطکاکی نامتعارف در گیرایش ترمز، یا خطاهای کنترلی را تضمین کند.
این سامانه، بهجای اتکا به گسیختگی، با اعمال نیرو در امتداد ریلها، انرژی جنبشی کابین را از طریق افزایش نیروی نرمال و ضریب اصطکاک مؤثر، به گرمای موضعی و تغییر شکل کنترلشده (در محدودهی استاندارد) تبدیل میکند؛ بدینسان، شتاب منفی محدود و قابلپیشبینی فراهم میشود که از بروز آسیبهای مکانیکی ناگهانی و خطرات برای سرنشینان جلوگیری میکند.
تعریف دقیق پاراشوت مستلزم تفکیک میان «عملکرد تدریجی» و «عملکرد قفل لحظهای» است؛ اولی برای مدیریت اضافهسرعتهای دستورپذیر و جلوگیری از شوکهای شدید طراحی شده، دومی برای توقف قاطع در شرایط بحرانی با حاشیهی ایمنی بالا. علاوه بر این، سامانه باید با الزامات استانداردهای EN 81 و بخشهای مرتبط در ISO همخوانی داشته باشد تا در آزمونهای پذیرش، معیارهای شتاب، مسافت توقف، حد انرژی جذبشده، و قابلیت بازگردانی به حالت آمادهبهکار را برآورده نماید. برای متخصصان، پاراشوت نهفقط یک قطعه، بلکه یک «منظومهی عملکردی» است که رفتار دینامیکی سامانهی بالابر را در بدترین سناریوها، قابلکنترل و پیشبینی میکند؛ این پیشبینیپذیری، محور اصلی مدیریت ریسک در طراحی، اجرا، نگهداری و پایش وضعیت محسوب میشود.
در نتیجه، پرسش «پاراشوت آسانسور چیست و چگونه جان شما را نجات میدهد؟» پاسخی روشن دارد: با شناسایی بهموقع اضافهسرعت و تبدیل کنترلشدهی انرژی حرکت، از سقوط آزاد، ضربهی مخرب، و ناپایداری سازهای جلوگیری میکند و بهصورت لایهی نهایی دفاعی، ایمنی سرنشینان را در سطح صنعتی تضمین مینماید.
معماری سامانه ایمنی: اجزا و تعاملات
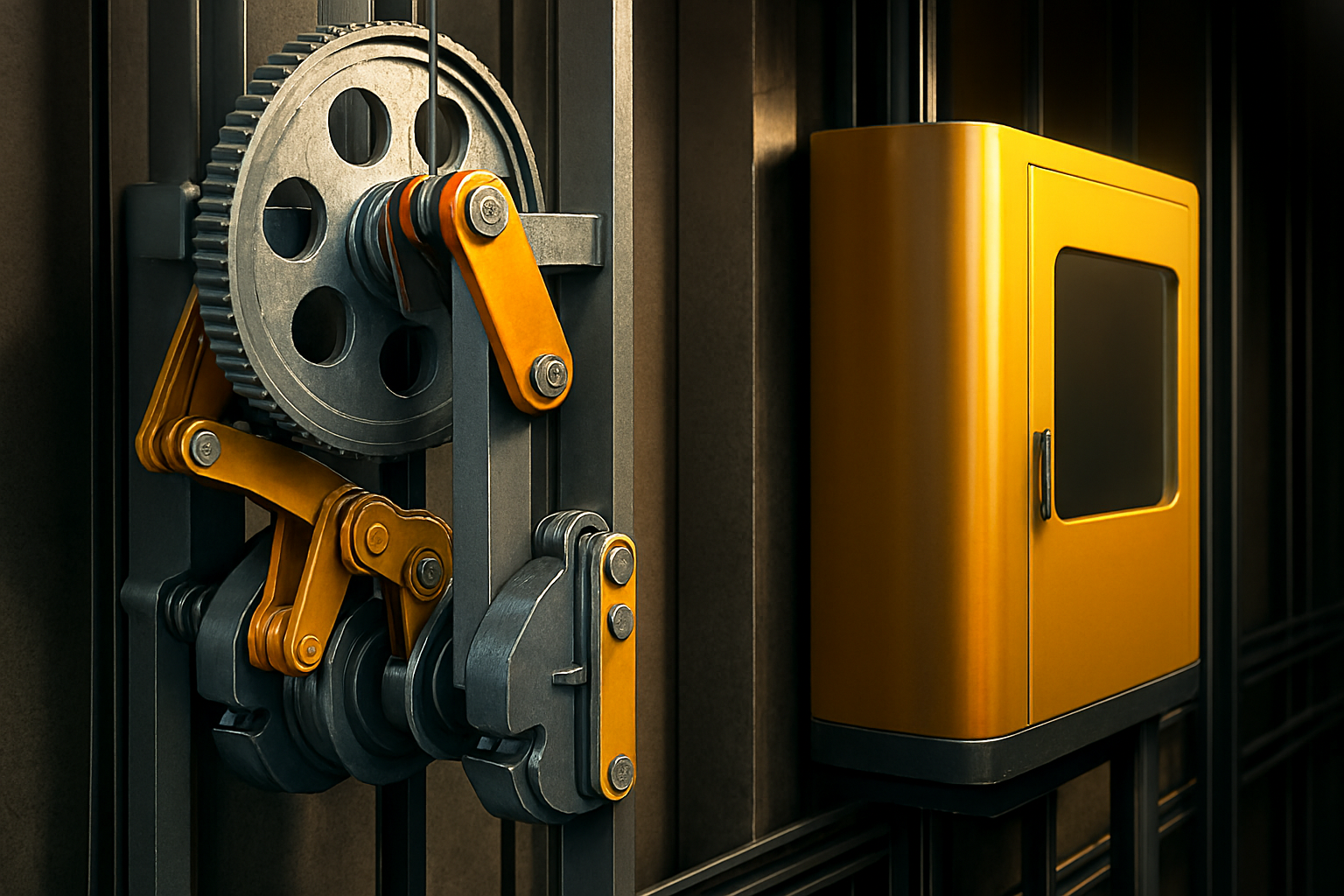
معماری پاراشوت آسانسور بر مبنای ترکیب اجزای مکانیکی و حسگرهای منطقی بنا شده است تا یک حلقهی ایمنی مستقل اما منسجم از کنترل اصلی فراهم شود. در قلب سامانه، گیرههای اصطکاکی یا دندانهای روی کالسکهی کابین یا کادر وزنه قرار میگیرند که با تحریک گاورنر سرعت یا تجاوز از آستانههای مکانیکی، درگیر ریلهای راهنمای فولادی با پروفیلهای T یا U اختصاصی میشوند.
برای مشاهده مشخصات و سفارش خدمات بالابر خانگی به صفحه بالابر خانگی در کرج مراجعه کنید
این گیرهها از نظر متریال، عملیات حرارتی، و زبری سطح بهگونهای مهندسی میشوند که ضریب اصطکاک هدفمند و مقاومت سایش قابلقبول در چرخههای آزمون داشته باشند. اهرمهای انتقال نیرو نسبتهای مکانیکی را تعیین و از طریق فنرهای پیشبارگذاریشده، پاسخ اولیه را با حساسیت مشخص تنظیم میکنند تا «شروع درگیری» بدون ضربهی ناگهانی و با شتاب منفی محدود انجام شود.
گاورنر سرعت، که معمولاً روی سقف چاه یا در مسیر کابین نصب میگردد، با اندازهگیری سرعت خطی طناب گاورنر، در صورت عبور از آستانهی تعریفشده، قفل میکند و از طریق سیم یا میلهی رابط، فرمان مکانیکی فعالسازی به پاراشوت منتقل میشود؛ در برخی معماریها، یک کانال الکتریکی/الکترونیکی برای قطع توان محرکه و اعمال ترمز اصلی همزمان استفاده میشود تا اثرات کنترلی همافزا حاصل گردد.
افزودنیهای جذب ضربه، مانند بلوکهای لاستیکی یا پلییورتان و صفحات فنری، برای کاهش قلهی نیروی انتقالی و جلوگیری از آسیب موضعی به ریل بهکار میروند. مسیرهای بازآرایی پس از عملکرد شامل آزادسازی تدریجی گیرهها، بازرسی بصری نقاط تماس، اندازهگیری تغییر شکلهای ریل و کنترل هممحوری کالسکه است تا از بازگشت سامانه به «وضعیت آمادهبهکار» اطمینان حاصل شود. تعاملات میان کنترلر، محدودکنندههای انتهایی، سنسورهای درب و سامانهی مخابرهی خطا باید بهگونهای طراحی شوند که فعالسازی پاراشوت با قطع توان محرکه و اعلام وضعیت ایمنی تلفیق شود؛ این تلفیق، هم برای مدیریت بحران و هم برای تحلیل پسارویداد جهت بهبود پارامترهای تنظیمی ضروری است.
اصول دینامیکی و اصطکاکی عملکرد پاراشوت آسانسور چیست
فیزیک عملکرد پاراشوت آسانسور بر تبدیل انرژی جنبشی کابین یا کادر وزنه به انرژیهای تلفاتی تحت کنترل استوار است؛ بهویژه از طریق افزایش نیروی نرمال بین گیره و سطح ریل و مدیریت ضریب اصطکاک مؤثر در بازهی زمانی توقف. هنگامی که گاورنر سرعت آستانهی اضافهسرعت را تشخیص میدهد، تحریک مکانیکی باعث درگیری گیرهها با ریل میشود. در سامانههای تدریجی، پروفیل تماس و مادهی پوششدهیشده روی گیره بهگونهای است که منحنی نیروی اصطکاک با افزایش جابجایی کنترل میگردد؛ هدف، دستیابی به شتاب منفی تقریباً یکنواخت و محدود برای کاهش تکانهی وارده به سازه و سرنشینان است. رفتار گذرا تابعی از جرم مؤثر، سرعت اولیه، سختی مجموعهی سازهای کالسکه-ریل، و مشخصات فنرها و بلوکهای ضربهگیر است.
در بازهی توقف، بخش قابلتوجهی از انرژی حرکت، به گرمای موضعی در منطقهی تماس و به تغییر شکلهای الاستوپلاستیک کوچک در سطح ریل و گیره تبدیل میشود. کنترل این تبدیل انرژی مستلزم تنظیم دقیق پارامترهای پیشبار، زبری سطح، و هندسهی فازهای درگیری است. حساسیت عملکرد نسبت به شرایط محیطی نیز قابلاعتناست: آلودگی سطح ریل، رطوبت، روغنکاری نامناسب یا تغییرات دما میتوانند ضریب اصطکاک و در نتیجه مسافت توقف را تحتتأثیر قرار دهند. از این رو، طراحی باید شامل تلرانسهای عملکردی، سناریوهای آزمون سرد و گرم، و پروتکلهای پاکسازی و بازرسی دورهای باشد.
برای مشاهده مشخصات و سفارش خدمات بالابر کارگاهی به صفحه بالابر کارگاهی در کرج مراجعه کنید
تفاوت اساسی میان پاراشوت لحظهای و تدریجی در شکل منحنی نیروی-جابجایی است: نوع لحظهای با جهش سریع نیروی نرمال و قفل هندسی، توقف کوتاه و قاطع ایجاد میکند؛ نوع تدریجی با شیب کنترلشده، توقف نرمتر و قابلپیشبینیتر بهدست میدهد. مهندسان برای انتخاب نوع مناسب، ماتریس تصمیمی مبتنی بر سرعت نامی، جرم کابین، کلاس استفاده، محدودیتهای سازهای چاه و ریل، و الزامات استانداردی تدوین میکنند تا «تناسب عملکرد» برقرار شود.
مدلسازی نیروها و انرژی در توقف اضطراری
برای مدلسازی رفتار پاراشوت در توقف اضطراری، تحلیل چنددامنهای نیرو، انرژی و زمان ضروری است. ابتدا جرم مؤثر سامانه شامل جرم کابین، مسافر، و سهم دینامیکی طنابها و اجزای همراه برآورد میشود. سرعت آغازین در لحظهی تحریک، ورودی اصلی انرژی جنبشی است که باید از طریق اصطکاک و تغییر شکلهای محدود جذب شود. مدل نیرو مبتنی بر تابع F(x) است که افزایش نیروی نرمال را با جابجایی تماس توصیف میکند؛ در نوع تدریجی، این تابع دارای شیب کنترلشده و اشباع محدود است تا از جهشهای ناگهانی جلوگیری شود.
همزمان، معادلهی تعادل انرژی نشان میدهد که انتگرال نیروی اصطکاک بر حسب جابجایی برابر با انرژی جذبشده است؛ بنابراین، انتخاب مواد و زبری سطح بهطور مستقیم بر مسافت توقف و شتاب منفی اثر میگذارد.
افزودنیهای جذب ضربه مانند بلوکهای الاستومری نقش فیلتر گذرا را بازی میکنند و قلهی نیرو را کاهش میدهند؛ این امر تا حدی توزیع انرژی را از تماس فلز-فلز به عناصر کمکی منتقل میکند و خطر خستگی موضعی ریل را کاهش میدهد. شرایط محیطی (آلودگی، رطوبت، دما) باید در مدل بهصورت پارامترهای تصادفی یا سناریوهای مرزی وارد شوند تا مقاومت سامانه در برابر تغییرات غیرقابلکنترل ارزیابی گردد. برای اعتبارسنجی، استفاده از دادههای آزمون میدانی و کالیبراسیون پارامترها ضروری است؛ مقایسهی منحنیهای سرعت-زمان و شتاب-زمان اندازهگیریشده با نتایج مدل، شاخص انطباق عملکرد را میدهد.
در نهایت، هدف مدلسازی، ایجاد مرزهای طراحی است: تعیین حداکثر سرعت قابلمهار، مسافت توقف مجاز، و حاشیهی ایمنی نسبت به ظرفیتهای ریل و کالسکه. این مرزها در انتخاب بین پاراشوت لحظهای و تدریجی، و در تنظیم پیشبار فنرها و آستانههای گاورنر، نقش محوری دارند و تضمین میکنند که توقف اضطراری نهتنها ایمن، بلکه سازگار با الزامات استاندارد و قابلیت بازآرایی پس از عملکرد باشد.
برای مشاهده مشخصات و سفارش خدمات بالابر صنعتی به صفحه بالابر صنعتی در کرج مراجعه کنید
انواع پاراشوت و معیارهای انتخاب
طبقهبندی پاراشوت آسانسور معمولاً به سه خانوادهی اصلی تقسیم میشود: نوع لحظهای (Instantaneous)، نوع تدریجی (Progressive)، و سامانههای ترکیبی یا مبتنی بر وزنهی تعادل برای کابین یا کادر وزنه. نوع لحظهای برای سناریوهایی با نیاز به توقف سریع و قاطع مناسب است؛ این نوع با استفاده از قفل هندسی و افزایش ناگهانی نیروی تماس، مسافت توقف کوتاه ایجاد میکند اما مستلزم بررسی دقیق ظرفیت ریل و سازه برای تحمل قلهی نیرو است.
نوع تدریجی بهمنظور مدیریت توقف نرمتر در سرعتهای بالاتر و بارهای متغیر طراحی میشود؛ پروفیل تماس، مواد پوششی، و فنرهای پیشبار بهگونهای تنظیم میشوند که منحنی نیرو با شیب ملایم رشد کند و شتاب منفی در محدودهی قابلقبول باقی بماند. سامانههای مرتبط با کادر وزنه نیز باید متناسب با جرم و سرعت اختصاصی آن انتخاب شوند تا در صورت وقوع اختلالات، رفتار کلی چاه پایدار بماند و نیروهای متقابل در طنابها و فلکهها در محدودهی امن کنترل شوند. معیارهای انتخاب شامل سرعت نامی آسانسور، کلاس استفاده (مسکونی، تجاری، بیمارستانی، صنعتی)، ظرفیت بار، مشخصات ریل (مدول، پروفیل، سختی)، شرایط محیطی، و سیاستهای نگهداری و بازرسی سازمان بهرهبردار است.
علاوه بر آن، همخوانی با استانداردهای EN 81 و الزامات آزمونهای پذیرش، مانند محدودیت شتاب حین توقف، مسافت توقف مجاز، و قابلیت بازآرایی پس از عملکرد، باید در ماتریس تصمیم لحاظ گردد. از منظر هزینهی مالکیت، پاراشوتهایی که نیازمند تنظیمات دقیقتر و مواد پوششی خاص هستند ممکن است هزینهی اولیهی بالاتری داشته باشند اما در بلندمدت با کاهش سایش ریل و افزایش قابلیت پیشبینی عملکرد، هزینههای نگهداری کمتر و زمانهای توقف کوتاهتر را رقم بزنند. بهطور خلاصه، انتخاب صحیح پاراشوت، نتیجهی بهینهسازی میان ایمنی، سازگاری سازهای، عملکرد دینامیکی، هزینه و الزامات مقرراتی است که باید با تحلیل فنی جامع و دادههای آزمون میدانی پشتیبانی شود.
| نوع | ویژگی کلیدی | مزیت | محدودیت |
|---|---|---|---|
| لحظهای | قفل سریع با نیروی تماس بالا | توقف کوتاه و قاطع | قلهی نیرو بالا؛ نیاز به ریل مقاوم |
| تدریجی | منحنی نیرو با شیب کنترلشده | شتاب منفی یکنواخت؛ راحتی بیشتر | مسافت توقف بلندتر؛ تنظیم پیچیدهتر |
| کادر وزنه | تناسب با جرم و مسیر وزنه | پایداری کل چاه در اختلالات | هماهنگی دقیق با کابین و طنابها |
برای مشاهده مشخصات و سفارش خدمات بالابر شیشه ای به صفحه بالابر شیشه ای در کرج مراجعه کنید
گاورنر سرعت و منطق تحریک
گاورنر سرعت بهعنوان محرک اولیهی پاراشوت، نقش «داور» را در تشخیص عبور از آستانهی سرعت بازی میکند. این سامانه با اندازهگیری سرعت خطی طناب اختصاصی، در صورت تجاوز از حد تنظیمشده، قفل میشود و بهصورت مکانیکی نیرو یا دستور فعالسازی را به مجموعهی گیرهها منتقل میکند. در معماریهای پیشرفته، کانالهای سیگنال الکتریکی نیز برای قطع توان محرکه، فعالسازی ترمز اصلی، و ارسال هشدار به کنترلر استفاده میشوند تا توقف اضطراری در یک توالی همزمان و همافزا رخ دهد.
تنظیم آستانههای گاورنر باید متناسب با سرعت نامی، کلاس استفاده، و مشخصات پاراشوت باشد؛ آستانهی بسیار پایین ممکن است فعالسازیهای کاذب را افزایش دهد و بهرهبرداری را مختل کند، درحالیکه آستانهی بسیار بالا حاشیهی ایمنی را کاهش میدهد. آزمونهای دورهای گاورنر شامل چک سرعت تحریک، عملکرد قفل مکانیکی، وضعیت یاتاقانها، و بررسی سایش فلکهها است تا دقت اندازهگیری و قابلیت اعتماد حفظ شود.
اتصال مکانیکی بین گاورنر و پاراشوت باید کملَقی، مقاوم به خستگی، و دارای نگهدارندههای ایمن باشد تا در شرایط ارتعاشی و دمایی مختلف، انتقال فرمان دچار تأخیر یا خطا نشود. در سیستمهای با کنترل پیشرفته، دادههای رویداد تحریک ذخیره و برای تحلیل پسارویداد استفاده میشود تا الگوهای عملکرد و نیازهای تنظیم مجدد شناسایی گردند. هماهنگی منطقی میان گاورنر، پاراشوت، ترمز محرکه، و محدودکنندههای انتهایی، پایهی مدیریت بحران است؛ این هماهنگی باید در مستندات فنی پروژه بهصورت توالی عملکردی دقیق و قابلآزمون تعریف شود تا تیم نگهداری بتواند با اتکا به معیارهای روشن، صحت عملکرد را در بازههای زمانی تعیینشده راستیآزمایی کند.
سناریوهای نقص و حالتهای خرابی
تحلیل حالتهای خرابی در پاراشوت آسانسور برای تضمین ایمنی سیستمیک ضروری است. خرابیها را میتوان به دستههای تحریک نادرست، درگیری ناقص، سایش غیرعادی، آلودگی سطح تماس، شکستگی عناصر انتقال نیرو، و ناهماهنگی با گاورنر تقسیم کرد. تحریک نادرست اغلب ناشی از تنظیم نامناسب آستانهی گاورنر، لقی بیش از حد در لینکها، یا نویز مکانیکی/الکتریکی است که سبب فعالسازی کاذب یا تأخیر در فعالسازی میشود.
درگیری ناقص زمانی رخ میدهد که گیرهها بهدلیل زبری نامناسب، آلودگی روغنی یا رطوبت، نتوانند نیروی نرمال کافی ایجاد کنند؛ نتیجه، افزایش مسافت توقف یا لغزشهای دورهای است که میتواند به سایش نقاط تماس و گرمشدن موضعی بیشازحد منجر شود. سایش غیرعادی در گیرهها و ریلها معمولاً از تنظیم غلط پیشبار فنر یا مواد پوششی نامتناسب ناشی میگردد؛ این سایش با تغییر پروفیل تماس، رفتار اصطکاکی را دگرگون کرده و پایداری توقف را تهدید میکند. شکستگی در عناصر انتقال نیرو، مانند اهرمها یا پینها، غالباً به علت خستگی یا ضربههای خارج از طراحی ایجاد میشود و باید با انتخاب مواد با مقاومت مناسب و کنترل کیفیت ساخت کاهش یابد.
ناهماهنگی با گاورنر، شامل تأخیر در فرمان یا عدم قطع توان محرکه، میتواند توقف اضطراری را ناکامل سازد و خطر بازشتاب را افزایش دهد. برای هر حالت خرابی، راهکارهای پیشگیرانه وجود دارد: تنظیم دقیق آستانهها، آزمونهای دورهای با سناریوهای واقعی، پاکسازی سطح تماس و کنترل رطوبت، بهروزرسانی مواد پوششی و فنرها، و ثبت و تحلیل دادههای رویداد. مستندسازی دقیق و آموزش تیم نگهداری، در کنار استفاده از شاخصهای وضعیت مانند دمای سطح تماس یا مقدار لغزش، میتواند تشخیص زودهنگام و اقدام اصلاحی سریع را امکانپذیر سازد.
برای مشاهده مشخصات و سفارش خدمات بالابر فروشگاهی به صفحه بالابر فروشگاهی در کرج مراجعه کنید
حالتهای خرابی رایج و راهکارهای مهندسی
برای مدیریت جامع ریسک، باید حالتهای خرابی رایج پاراشوت را با رویکرد سیستماتیک شناسایی و راهکارهای مهندسی متناظر را پیادهسازی کرد. نخست، فعالسازی کاذب بهدلیل آستانهی نامناسب یا نویز محیطی میتواند موجب توقفهای غیرضروری و فرسایش زودرس شود؛ راهکار، کالیبراسیون دقیق گاورنر، کاهش لقی لینکها، و افزودن فیلترهای مکانیکی/منطقی است. دوم، درگیری ناقص بهواسطهی آلودگی روغنی یا رطوبت، عملکرد اصطکاکی را مختل میکند؛ پاکسازی برنامهریزیشده، استفاده از پوششهای مقاوم به آلودگی، و مدیریت روانکار در محیط چاه ضروری است.
سوم، سایش غیرعادی گیرهها و ریلها به تغییر پروفیل تماس و کاهش یکنواختی شتاب منفی منجر میشود؛ انتخاب مواد با سختی و زبری هدفمند، کنترل پیشبار فنر، و پایش چرخهای با اندازهگیریهای ابعادی و حرارتی پیشنهاد میشود. چهارم، شکست عناصر انتقال نیرو به علت خستگی، باید با کنترل کیفیت ساخت، تحلیل تنش و بهینهسازی هندسهی اهرمها و پینها مدیریت گردد. پنجم، ناهماهنگی با گاورنر و تأخیر در قطع توان محرکه، توقف اضطراری را ناقص میکند؛ یکپارچهسازی منطقی با کنترلر، آزمون توالی عملکردی، و افزونگی سیگنالها میتواند اطمینان عملکرد را بالا ببرد.
ششم، اثرات محیطی مانند دماهای افراطی و گردوغبار، ضریب اصطکاک را تغییر میدهند؛ تلرانسهای طراحی، آزمونهای سرد/گرم، و سامانههای تهویه/پالایش باید در برنامه لحاظ شوند. نهایتاً، مستندسازی دقیق رویدادها، تحلیل ریشهای و بازخورد به طراحی برای بهبود چرخهای الزامی است تا سامانه همواره در پنجرهی عملکردی امن باقی بماند.
فعالسازی کاذب
کالیبراسیون آستانهی گاورنر، کاهش لقی مکانیکی، و اعمال فیلترهای منطقی برای حذف نویز، راهکارهای کلیدی کاهش فعالسازیهای ناخواسته هستند.
درگیری ناقص
پاکسازی منظم سطح ریل و گیره، کنترل رطوبت و روانکار، و استفاده از پوششهای مقاوم به آلودگی، یکنواختی اصطکاک را حفظ میکند.
سایش غیرعادی
انتخاب مواد با سختی مناسب، تنظیم پیشبار فنر، و پایش ابعادی دورهای پروفیل تماس، از تغییر رفتار توقف جلوگیری میکند.
شکست انتقال نیرو
تحلیل خستگی، بهینهسازی هندسهی اهرمها و پینها، و کنترل کیفیت ساخت، احتمال شکست را کاهش میدهد.
ناهماهنگی با گاورنر
یکپارچهسازی سیگنالها، آزمون توالی عملکرد، و افزونگی منطقی، اطمینان از قطع توان و تحریک صحیح پاراشوت را تضمین میکند.
الزامات استاندارد، آزمونها و پذیرش
پایهی حقوقی و فنی بهرهبرداری از پاراشوت آسانسور بر الزامات استاندارد بینالمللی و ملی استوار است؛ در اروپا، EN 81 مجموعهی جامعی از مقررات را برای ایمنی آسانسورها تدوین کرده که حدود سرعت، شتاب توقف، مسافت توقف، و روشهای آزمون را مشخص میکند. آزمونهای پذیرش شامل تحریک کنترلشدهی گاورنر در سرعتهای مرزی، اندازهگیری منحنیهای سرعت-زمان و شتاب-زمان، بررسی مسافت توقف، و ارزیابی یکپارچگی سازهای ریلها پس از عملکرد است. علاوه بر آزمونهای اولیه، پروتکلهای دورهای باید بر اساس طبقهی استفاده و سابقهی رویداد تنظیم شوند؛ این پروتکلها شامل بازرسی بصری نقاط تماس، کنترل سایش و زبری سطح، آزمون عملکرد فنرها و اهرمها، و بررسی صحت قطع توان محرکه و ترمز اصلی هستند.
مستندسازی نتایج آزمون و ردیابی تغییرات تنظیمی، برای ایجاد تاریخچهی عملکرد و تصمیمگیری مبتنی بر داده ضروری است. همچنین، الزامات مربوط به قابلیت بازآرایی پس از عملکرد باید برآورده شود تا سامانه بدون نیاز به تعویض کامل، به وضعیت آمادهبهکار بازگردد؛ این امر، هزینههای مالکیت را کاهش و قابلیت بهرهبرداری را افزایش میدهد. انطباق با استانداردها، تنها با داشتن تجهیزات مناسب حاصل نمیشود؛ نیازمند فرهنگ ایمنی، آموزش مستمر تیم نگهداری و بازرسی، و استفاده از ابزارهای اندازهگیری معتبر و کالیبره است.
هرگونه تغییر در اجزا یا تنظیمات باید با ارزیابی اثر بر منحنیهای توقف و مرزهای طراحی همراه باشد تا مطابقت حفظ شود. در نهایت، پذیرش موفق پاراشوت، حاصل یک زنجیرهی کامل از طراحی مناسب، ساخت با کیفیت، نصب صحیح، آزمون دقیق، و نگهداری منظم است که مجموعاً ریسکهای سیستمیک را به سطح قابلقبول کاهش میدهند.
برای دریافت اطلاعات بیشتر به صفحه اصلی شرکت آرشه مراجعه کنید
محاسبات طراحی، انتخاب مواد و پارامترهای اصطکاک
برای طراحی پاراشوت، مهندس باید ماتریس محاسباتی جامعی را تدوین کند که از تعیین معیارهای عملکرد آغاز و به انتخاب مواد و هندسهی تماس میانجامد. نخست، سرعت نامی، حداکثر سرعت قابلمهار، و مسافت توقف هدف بر اساس کلاس استفاده و الزامات استاندارد تعیین میشود. سپس با محاسبهی انرژی جنبشی در شرایط مرزی، ظرفیت جذب انرژی سامانه از طریق اصطکاک و عناصر جذب ضربه ارزیابی میگردد. انتخاب مواد گیره و پوششها بهگونهای انجام میشود که ترکیب سختی، مقاومت به سایش، و زبری سطح مطلوب ایجاد شود؛ زبری باید بهصورت کنترلشده تولید و پایش شود تا ضریب اصطکاک مؤثر در پنجرهی طراحی حفظ گردد.
هندسهی تماس (زاویهها، شعاعها، و سطح مؤثر) منحنی نیرو-جابجایی را شکل میدهد و در نوع تدریجی باید شیب افزایش نیرو را قابل کنترل کند.
پیشبار فنرها و نسبتهای اهرمی برای تنظیم حساسیت تحریک و یکنواختی شتاب منفی حیاتی هستند. تلرانسهای ساخت و نصب، لقی مجاز لینکها، و هممحوری کالسکه-ریل بهگونهای باید تعیین شوند که عملکرد تکرارپذیر و بدون نوسان حاصل شود. سناریوهای محیطی مانند رطوبت، دمای پایین/بالا، و وجود ذرات آلاینده نیز در انتخاب مواد و پوششها دخیلاند؛ بهعنوان مثال، پوششهای مقاوم به روغنکاری یا آب باید برای حفظ اصطکاک در شرایط نامطلوب لحاظ شوند.
تحلیل حساسیت پارامترها به مهندس اجازه میدهد مرزهای طراحی را بشناسد و نقاط بحرانی را با افزونگی یا تنظیمات محافظهکارانه پوشش دهد. نهایتاً، مدل و محاسبات باید با آزمونهای میدانی و دادههای واقعی کالیبره شوند تا شکاف میان تئوری و عمل کاهش یابد؛ این چرخهی طراحی-آزمون-بازنگری، تضمین میکند که پاراشوت نهتنها روی کاغذ، بلکه در میدان بهرهبرداری نیز رفتار ایمن، پایدار و قابلپیشبینی ارائه دهد.
روش محاسباتی نمونه برای توقف تدریجی
در روش محاسباتی نمونه، هدف تعیین پیشبار فنر و هندسهی تماس برای دستیابی به شتاب منفی یکنواخت در محدودهی طراحی است. ابتدا انرژی جنبشی در شرایط مرزی با جرم مؤثر و سرعت آغازین محاسبه میشود. سپس تابع هدف بهصورت حداقلسازی تغییرات شتاب منفی تعریف میگردد و قیود شامل مسافت توقف مجاز، حداکثر نیروی تماس قابلتحمل توسط ریل، و محدودیتهای دمایی سطح تماس مشخص میشوند. پارامترهای طراحی شامل زبری سطح، زاویهی تماس، سطح مؤثر، و سختی فنرها هستند که با روشهای بهینهسازی غیرخطی (مانند جستوجوی گرادیانی با قیود) تنظیم میگردند.
برای هر مجموعه پارامتر، حل عددی معادلات حرکت با نیروی اصطکاک وابسته به جابجایی انجام میشود تا منحنیهای سرعت-زمان و شتاب-زمان استخراج گردد؛ معیار همگرایی زمانی برآورده میشود که یکنواختی شتاب در حدود تعیینشده حفظ و قلهی نیرو از آستانهی مجاز فراتر نرود. تحلیل حساسیت نشان میدهد کدام پارامترها بیشترین اثر را بر مسافت توقف و قلهی نیرو دارند؛ معمولاً زبری سطح و پیشبار فنر حساسیت بالایی دارند. پس از انتخاب مجموعهی بهینه، آزمونهای میدانی برای اعتبارسنجی انجام میشود؛ اختلافها با تنظیمات جزئی در پیشبار و اصلاح سطح تماس کاهش مییابند.
نهایتاً، سند طراحی شامل پارامترهای نهایی، پنجرهی عملکردی، و دستورالعملهای نگهداری تولید میگردد تا سامانه در طول عمر بهرهبرداری، رفتار محاسبهشده را حفظ کند. این روش نمونه، چارچوبی عملی برای پلزدن میان تئوری و میدان است و به تیمهای طراحی و نگهداری ابزار مشترکی برای گفتوگو و تصمیمسازی ارائه میدهد.
یکپارچهسازی با کنترلر، ترمز محرکه و مدار ایمنی
پاراشوت بهتنهایی ایمنی کامل را تضمین نمیکند؛ ارزش واقعی آن در یکپارچهسازی دقیق با کنترلر، ترمز محرکه و مدار ایمنی نمایان میشود. در لحظهی تشخیص اضافهسرعت توسط گاورنر، سیگنالهای قطع توان و فعالسازی ترمز باید بدون تأخیر با تحریک مکانیکی پاراشوت همزمان شوند؛ این همزمانی، از بازشتاب ناخواسته و اثرات دینامیکی نامطلوب پیشگیری میکند.
کنترلر باید رویداد توقف اضطراری را ثبت، پیام هشدار را صادر، و وضعیت ایمنی را تا پایان فرایند بازآرایی مدیریت کند. مدار ایمنی با افزونگی منطقی و نظارت بر وضعیت سنسورها، از صحت قطع توان و عدم امکان حرکت ناگهانی پس از توقف اطمینان حاصل مینماید. در سیستمهای پیشرفته، ارتباط با سامانهی مانیتورینگ ساختمان و ارسال گزارشهای رویداد، امکان تحلیل پسارویداد و بهبود تنظیمات را فراهم میآورد. طراحی سیمکشی، کیفیت اتصالات و محافظت در برابر نویز الکتریکی برای حفظ قابلیت اعتماد سیگنالها حیاتی است.
مستندسازی توالی عملکرد (Sequence of Events) و آزمونهای دورهای همگامسازی، به تیم نگهداری چارچوبی روشن میدهد تا هرگونه ناهماهنگی را پیش از بروز بحران شناسایی و اصلاح کند. در نهایت، یکپارچهسازی موفق پاراشوت با اجزای کنترلی، نهفقط توقف ایمن، بلکه بازگشت سریع و مطمئن به حالت آمادهبهکار را تضمین مینماید و زمان خواب سیستم را کاهش میدهد.
رویههای نگهداری، بازرسی و کالیبراسیون
نگهداری مؤثر پاراشوت آسانسور متکی بر برنامهی بازرسی ساختارمند و کالیبراسیون دورهای است تا رفتار ایمن و تکرارپذیر حفظ گردد. برنامهی بازرسی باید شامل بررسی بصری گیرهها، سطوح تماس ریل، اهرمها و پینها، و عناصر جذب ضربه باشد؛ هرگونه نشانهی سایش، تغییر رنگ حرارتی، یا تغییر شکل موضعی باید ثبت و تحلیل شود. پاکسازی سطح ریل و گیره از آلودگیهای روغنی، گردوغبار و رطوبت برای حفظ ضریب اصطکاک حیاتی است؛ استفاده از مواد پاککنندهی سازگار با پوششها و پرهیز از روانکارهای مهاجم توصیه میشود.
کالیبراسیون پیشبار فنرها و تنظیم آستانهی گاورنر باید بر اساس دادههای آزمون و سوابق رویداد انجام شود تا فعالسازیهای کاذب کاهش و حاشیهی ایمنی حفظ گردد. آزمونهای عملکرد دورهای با تحریک کنترلشده، منحنیهای سرعت-زمان و شتاب-زمان را تولید میکند؛ تحلیل این منحنیها شاخص سلامت سامانه است. مستندسازی کامل یافتهها، اقدامات اصلاحی، و تغییرات تنظیمی ضرورت دارد تا تاریخچهی عملکرد قابلاتکا شکل گیرد. آموزش مستمر تیم نگهداری در زمینهی تشخیص علائم شکست، روشهای پاکسازی و کالیبراسیون، و توالیهای ایمنی، سطح خطاهای انسانی را پایین میآورد.
نهایتاً، ارتباط نزدیک با سازنده و بهروزرسانی دستورالعملها بر اساس فناوریهای جدید، تضمین میکند که پاراشوت در طول عمر بهرهبرداری، در پنجرهی عملکردی امن باقی بماند و در لحظات بحرانی، توقفی قابلپیشبینی و محافظهکارانه فراهم آورد.
چکلیست بازرسی و اقدام اصلاحی
چکلیست مؤثر باید محورهای کلیدی عملکرد پاراشوت را پوشش دهد و مسیر اقدام اصلاحی روشن ارائه کند. نخست، بررسی بصری گیرهها و ریلها برای تشخیص سایش، تغییر رنگ ناشی از گرما، یا خراشهای غیرعادی انجام میشود؛ هر نشانه باید ثبت و با سابقهی عملکرد مقایسه گردد. دوم، پاکسازی سطوح تماس با مواد سازگار و کنترل وجود آلودگیهای روغنی و رطوبت ضروری است؛ سطح تمیز و زبری کنترلشده، ضریب اصطکاک مؤثر را حفظ میکند.
سوم، اندازهگیری پیشبار فنر با ابزار کالیبره و مقایسه با مقادیر طراحی انجام میشود؛ انحرافها باید با تنظیم یا تعویض فنر اصلاح گردد. چهارم، آزمون تحریک گاورنر در سرعتهای مرزی برای راستیآزمایی قطع توان محرکه و زمان پاسخ پاراشوت انجام میگیرد؛ هر تأخیر یا ناهماهنگی باید بلافاصله پیگیری شود. پنجم، تحلیل منحنیهای سرعت-زمان و شتاب-زمان از آزمون دورهای، شاخص یکنواختی توقف و قلهی نیرو را ارائه میدهد؛ انحراف از محدودهها، نیاز به بازتنظیم یا بازسازی سطح تماس را نشان میدهد.
ششم، مستندسازی رویدادها و اقدامات اصلاحی با برچسبگذاری نسخههای تنظیمی و تاریخ اجرا، امکان ردیابی و یادگیری سازمانی را فراهم میکند. نهایتاً، بازبینی دورهای دستورالعملها و آموزش تیم، بهروزرسانی بهترینعملها و سازگاری با شرایط محیطی و فناوریهای جدید را تضمین میکند تا سامانه در مرزهای ایمن باقی بماند.
بازرسی بصری و ثبت
ثبت عکس، یادداشت شرایط سطح و مقایسه با رکوردهای پیشین، روند سایش و گرمایش را آشکار و تصمیمگیری اصلاحی را تسهیل میکند.
پاکسازی و کنترل آلودگی
بهکارگیری پاککنندههای سازگار و مدیریت روانکارها، زبری مؤثر و ضریب اصطکاک را در محدودهی طراحی حفظ مینماید.
کالیبراسیون پیشبار
اندازهگیری با ابزار کالیبره و تنظیم فنرها مطابق سند طراحی، یکنواختی شتاب منفی را تضمین میکند.
آزمون تحریک و زمان پاسخ
تحریک کنترلشدهی گاورنر و سنجش توالی قطع توان تا درگیری پاراشوت، هرگونه تأخیر را پیش از بحران آشکار میسازد.
تحلیل منحنیهای عملکرد
مقایسهی سرعت-زمان و شتاب-زمان با محدودههای هدف، نیاز به بازتنظیم یا اصلاح سطح تماس را مشخص میکند.
تحلیل ریسک، ایمنی سیستمی و مدیریت پسارویداد
ایمنی پاراشوت در سطح سیستم، تنها با تحلیل ریسک ساختارمند و مدیریت پسارویداد تحقق مییابد. تحلیل حالات و اثرات خرابی (FMEA) برای شناسایی نقاط بحرانی و تخصیص اولویتهای اقدام ضروری است؛ هر ریسک با احتمال وقوع و شدت اثر امتیازدهی میشود تا اقدامات پیشگیرانه و پایشی هدفمند تعریف گردد. افزودن شاخصهای وضعیت مانند دمای سطح تماس، لغزش لحظهای، یا نویز ارتعاشی به سامانهی مانیتورینگ، امکان تشخیص زودهنگام انحرافها را فراهم میکند. پس از هر رویداد توقف اضطراری، مدیریت پسارویداد باید شامل استخراج دادهها، تحلیل علت ریشهای، ارزیابی اثرات سازهای و عملکردی، و تصمیمگیری برای بازتنظیم یا تعویض اجزا باشد.
مستندسازی دقیق، بهبود مستمر را تسهیل و فرهنگ ایمنی سازمان را تقویت میکند. تعامل با سازنده و نهادهای بازرسی برای بهروزرسانی دستورالعملها و تطبیق با فناوریهای جدید، ریسکهای نوظهور را پوشش میدهد. نهایتاً، ایمنی سیستمی پاراشوت نهفقط به مقاومت مکانیکی، بلکه به بلوغ فرآیندی، آموزش، ابزارهای پایش و تصمیمسازی مبتنی بر داده وابسته است؛ این منظومهی همافزا، احتمال رخدادهای شدید را کاهش و قابلیت پاسخگویی کنترلشده را افزایش میدهد.
نوآوریها و روندهای آینده
روندهای آینده در پاراشوت آسانسور به سوی هوشمندسازی، مواد پیشرفته و یکپارچهسازی عمیق با کنترلر حرکت میکند. حسگرهای تعبیهشده در گیرهها میتوانند دمای تماس، لغزش و الگوی نیرو را اندازهگیری و بهصورت لحظهای به سیستم مانیتورینگ ارسال کنند؛ این دادهها با الگوریتمهای یادگیری ماشین، انحرافها را پیشبینی و نگهداری پیشگیرانه را امکانپذیر میسازند. مواد پوششی نوین با نانوساختارهای مقاوم به آلودگی، ضریب اصطکاک پایدارتر در شرایط محیطی متغیر ارائه میدهند و مسافت توقف را قابلپیشبینیتر میکنند.
طراحیهای ماژولار که بازآرایی سریع پس از عملکرد را تسهیل میکنند، زمان خواب سیستم را کاهش میدهند. یکپارچهسازی با کنترلرهای پیشرفته، توالیهای ایمنی تطبیقی را ممکن میسازد؛ بهگونهای که قطع توان، فعالسازی ترمز و تحریک پاراشوت بر اساس شرایط لحظهای بار و سرعت، بهینه شود. استانداردها نیز به سمت تعریف شاخصهای عملکردی دقیقتر و روشهای آزمون مبتنی بر داده حرکت خواهند کرد؛ این تحول، رقابت سازندگان را به سمت کیفیت تکرارپذیر و قابلیت اعتماد بالاتر سوق میدهد. در مجموع، نوآوری در پاراشوت، از یک قطعهی مکانیکی منفرد فراتر میرود و به یک زیرسیستم هوشمند تبدیل میشود که با تحلیل داده و مواد پیشرفته، ایمنی را در سطحی بالاتر و پایدارتر تضمین میکند.