چرایی اهمیت انتخاب موتور مناسب
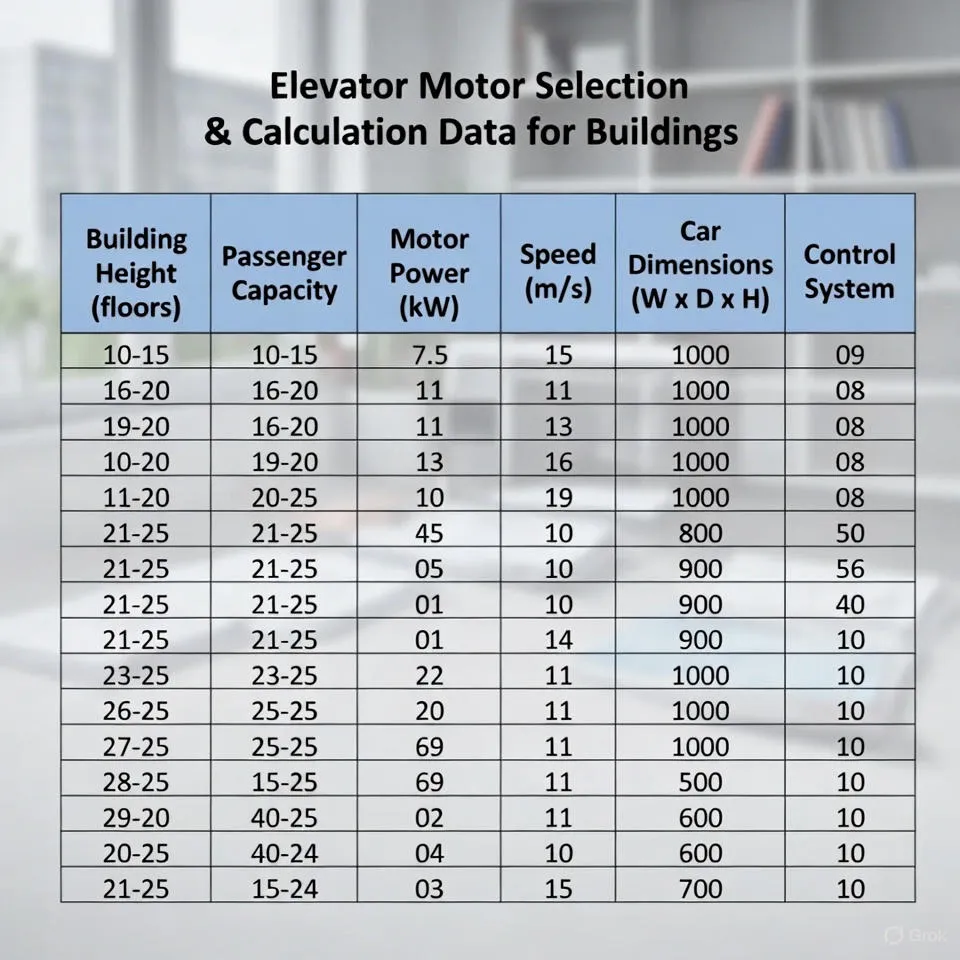
جدول انتخاب موتور آسانسور انتخاب موتور مناسب برای آسانسور نه تنها بر پاسخدهی حرکت (شتاب، سرعت، نوسان) تأثیر میگذارد، بلکه پیامدهایی در بهرهوری انرژی، کدهای ایمنی، عمر مفید اجزا و هزینههای عملیاتی دارد. در سطح تخصصی، مهندس طراحی باید متغیرهای بار دینامیک، ممان اینرسی کابین و وزنه، تلفات مکانیکی و الکتریکی، شرایط محیطی (دمای عملیاتی، رطوبت، ارتفاع از سطح دریا) و رفتار کنترلی (درایوهای VVVF/ کنترل برداری) را همزمان مدل کند.
آنالیز میتواند شامل شبیهسازی زمانی (time-domain) برای برآورد شتابهای گذرا و تحلیل فرکانسی برای شناسایی مودهای ارتعاشی باشد. انتخاب موتور نهایی همچنین تابعی از سیاستهای نگهداری، قابلیت دسترسی قطعات یدکی و الزامات نویز و ارتعاش در فضای ساکنان یا کاربران است.
تعاریف و پارامترهای کلیدی طراحی و جدول انتخاب موتور آسانسور
پارامترهای الکتریکی و مکانیکی مؤثر
در فرآیند طراحی و انتخاب موتور آسانسور، شناخت دقیق پارامترهای الکتریکی و مکانیکی نقش اساسی در تضمین عملکرد مطلوب و طول عمر سیستم دارد. توان اسمی موتور (kW) معرف بیشترین توان خروجی پیوستهای است که موتور قادر به تأمین آن در شرایط استاندارد میباشد. گشتاور نامی (Nm) و سرعت نامی (rpm) به طور مستقیم با مشخصات بار آسانسور و نسبت گیربکس ارتباط دارند.
در کنار این عوامل، بازده در نقاط مختلف بار (Partial Load Efficiency) نشاندهنده کیفیت طراحی الکترومغناطیسی و تلفات انرژی در سیستم است. ضریب توان و کلاس حرارتی نیز شاخصهایی برای میزان اتلاف انرژی و مقاومت حرارتی سیمپیچ محسوب میشوند. در طراحیهای حرفهای، رابطه بین توان خروجی، گشتاور لحظهای و سرعت زاویهای از طریق معادله P = T × ω تحلیل میشود تا محدوده عملکرد بهینه موتور مشخص گردد.
در حوزه مکانیکی، پارامترهایی مانند قطر درام یا پولی، نسبت گیربکس، ممان اینرسی مؤثر (J) و کیفیت یاتاقانها تأثیر تعیینکنندهای بر عملکرد دینامیکی سیستم دارند. قطر پولی بزرگتر سبب کاهش تنش در کابلها اما افزایش فضای نصب میشود، در حالی که نسبت گیربکس تعیینکننده گشتاور خروجی و سرعت حرکت کابین است. ممان اینرسی مؤثر باید به گونهای انتخاب شود که ضمن تضمین نرمی حرکت، از نوسانات دینامیکی و پدیدههای تشدید (resonance) جلوگیری کند.
تحلیل انتقال حرارت نیز برای جلوگیری از داغ شدن بیش از حد سیمپیچ و یاتاقانها حیاتی است، زیرا افزایش دما بهصورت نمایی عمر عایقها را کاهش میدهد. در سیستمهای مدرن، مدلسازی حرارتی با استفاده از دادههای بار متغیر و الگوی سفر آسانسور انجام میشود تا قابلیت اطمینان حرارتی تأیید شود.
از منظر الکترومغناطیسی، طراحی سیمپیچی و انتخاب مواد مغناطیسی نقش مهمی در کاهش تلفات و افزایش راندمان دارد. جریان راهاندازی (Inrush Current) یکی از عوامل بحرانی در طراحی مدارهای حفاظتی و انتخاب درایو است، زیرا مقادیر بالای آن میتواند سبب تداخل الکترومغناطیسی و فشار بر اجزای قدرت شود. نوع سیمپیچی (دو سر، سهفاز یا کوتاهشده) و هندسه استاتور و روتور تعیینکننده گشتاور لحظهای و پاسخ دینامیکی موتور است.
درایوهای فرکانس متغیر (VVVF) گرچه کنترل دقیقی بر سرعت و گشتاور فراهم میکنند، اما باعث ایجاد هارمونیکهایی میشوند که باید با فیلترهای مناسب مهار شوند. بنابراین، طراحی هماهنگ بین موتور و درایو یکی از الزامات اساسی برای عملکرد پایدار آسانسور محسوب میشود.
برای مشاهده مشخصات و سفارش خدمات بالابر خانگی به صفحه بالابر خانگی در کرج مراجعه کنید.
| پارامتر | توضیح فنی | تأثیر بر طراحی موتور آسانسور |
|---|---|---|
| توان اسمی (kW) | نشاندهنده حداکثر توان پیوسته خروجی موتور در شرایط استاندارد | تعیین ظرفیت حرارتی، ابعاد و مصرف انرژی سیستم |
| گشتاور نامی (Nm) | گشتاوری که موتور میتواند در حالت کاری پایدار تولید کند | تعیینکننده قدرت کشش و توانایی شتابدهی کابین |
| نسبت گیربکس | نسبت بین سرعت موتور و سرعت درام یا پولی خروجی | اثرگذار بر گشتاور خروجی و نرمی حرکت آسانسور |
| ممان اینرسی مؤثر (J) | معیاری از مقاومت سیستم در برابر تغییر سرعت چرخشی | تأثیر بر پایداری دینامیکی و پاسخ شتاب/ترمز |
| ضریب توان (Power Factor) | نسبت توان واقعی به توان ظاهری در مدار | بهینهسازی مصرف انرژی و کاهش تلفات شبکه |
| کلاس حرارتی | حداکثر دمای مجاز کار سیمپیچ و عایقها | تعیین ظرفیت باردهی مجاز و طول عمر موتور |
مثال عددی انتخاب موتور برای ساختمان ۱۰ طبقه
فرض کنید یک آسانسور در ساختمان ۱۰ طبقه با بار مفید کابین ۸۰۰ کیلوگرم و ظرفیت وزنه تعادل ۸۰۰ کیلوگرم داریم. هدف تعیین توان موتور و گشتاور نامی لازم برای حرکت نرم و ایمن کابین است. فاصله بین طبقات ۳ متر و سرعت نامی آسانسور ۱٫۵ متر بر ثانیه در نظر گرفته میشود. همچنین شتاب و ترمز استاندارد ۰٫۸ متر بر مجذور ثانیه فرض شده است.
گام ۱: محاسبه وزن کل سیستم
وزن کل سیستم (کابین + وزنه تعادل + بار مفید) به صورت زیر محاسبه میشود:
W_cabin = 800 kg × 9.81 m/s² = 7848 N
W_load = 800 kg × 9.81 m/s² = 7848 N
W_total = 7848 + 7848 = 15696 N
گام ۲: محاسبه نیروی لازم برای شتابدهی
با توجه به شتاب مشخص، نیروی لازم برای شتابدهی کابین برابر است با:
F_acc = m_total × a = 1600 kg × 0.8 m/s² = 1280 N
گام ۳: محاسبه گشتاور مورد نیاز موتور
فرض کنید قطر پولی گیربکس 0.4 متر است. گشتاور موتور به صورت زیر محاسبه میشود:
T = F_total × r_pulley
F_total = W_total + F_acc = 15696 + 1280 = 16976 N
r_pulley = 0.4 / 2 = 0.2 m
T_motor = 16976 × 0.2 = 3395.2 Nm
گام ۴: محاسبه توان موتور
سرعت خطی آسانسور ۱٫۵ m/s و شعاع پولی 0.2 m. سرعت زاویهای موتور برابر است با:
ω = v / r = 1.5 / 0.2 = 7.5 rad/s
توان مکانیکی موتور: P = T × ω = 3395.2 × 7.5 ≈ 25464 W ≈ 25.5 kW
نتیجه
با توجه به محاسبات فوق، موتور انتخابی باید توان اسمی حداقل ۲۵٫۵ کیلووات و گشتاور نامی حداقل ۳۴۰۰ نیوتنمتر داشته باشد. در عمل، برای در نظر گرفتن ضریب اطمینان و تلفات مکانیکی و الکتریکی، معمولاً ۱۰–۱۵٪ به این مقادیر افزوده میشود.
برای مشاهده مشخصات و سفارش خدمات بالابر کارگاهی به صفحه بالابر کارگاهی در کرج مراجعه کنید.
جدول جمعبندی محاسبات و پارامترهای موتور
| پارامتر | مقدار محاسبه شده | توضیح |
|---|---|---|
| وزن کل سیستم | 15696 N | جمع وزن کابین و وزنه تعادل |
| نیروی شتابدهی | 1280 N | نیروی مورد نیاز برای شتاب اولیه |
| گشتاور موتور | 3395.2 Nm | محاسبه بر اساس نیروی کل و شعاع پولی |
| توان مکانیکی موتور | 25.5 kW | توان مورد نیاز برای حرکت با سرعت نامی |
| توان پیشنهادی با ضریب اطمینان | ≈ 29 kW | در نظر گرفتن تلفات مکانیکی و الکتریکی |
قواعد و استانداردهای مرجع
گروه استانداردهای مرتبط و محدودیتهای آییننامهای
طراحی موتور و انتخاب آن برای آسانسور باید مطابق استانداردهای بینالمللی و ملی باشد؛ از جمله الزامات ایمنی عملکردی، تستهای استاتیکی و دینامیکی، و معیارهای EMC/برق صنعتی. مهندس باید استانداردهای مربوط به بارگذاری، سیستمهای ترمز، مقاومت کابلها و مسیر سیمکشی، و نیز ملاحظات مربوط به حفاظت از اضافهبار و قطع اضطراری را بررسی کند. در حوزه بینالمللی، استانداردها و بهترین شیوهها معمولاً شامل آزمونهای دورهای و روشهای شبیهسازی برای تضمین پایداری دینامیکی و تطابق با پروتکلهای نجات و تهویه کابین میشوند.
برای مشاهده مشخصات و سفارش خدمات بالابر صنعتی به صفحه بالابر صنعتی در کرج مراجعه کنید.
روششناسی محاسباتی برای تعیین توان و گشتاور
فرمولبندی معادلات تعادل انرژی و گشتاور
محاسبات توان مورد نیاز باید بر مبنای تجزیه و تحلیل انرژی انجام شود: توان مفید = بار نهایی × سرعت + تلفات مکانیکی + تلفات الکتریکی + توان مورد نیاز برای شتابدهی کابین و وزنه مقابل. برای حرکت در مسیر عمودی، معادلات حرکت خطی و معادلات گشتاور روی محور موتور بهصورت همزمان حل میشوند تا گشتاور در حالتهای راهاندازی، کار عادی و ترمز بازتولیدی بهدست آید. ممان اینرسی موثر محاسبهشده باید شامل مؤلفههای کابین، وزنه تعادل، درام/پولی و قطعات متحرک باشد و سپس با نسبت گیربکس تطبیق داده شود تا گشتاور موتور نهایی تعیین شود. پیشبینی دمای سیمپیچی بهمنظور جلوگیری از فرسایش عایق نیز در محاسبات توان دوام موتور ضروری است.
برای مشاهده مشخصات و سفارش خدمات بالابر شیشه ای به صفحه بالابر شیشه ای در کرج مراجعه کنید.
انواع موتورهای رایج در بازار و مزایا/معایب
مقایسه کلی موتورهای القایی، سنکرون و موتورهای سروو
| نوع موتور | مزایا | معایب |
|---|---|---|
| الکتریکی القایی (AC induction) | سازگاری بالا، هزینه کمتر، قابلیت کار با درایو VVVF | گشتاور راهاندازی محدود در برخی طراحیها، نیاز به درایو برای کنترل دقیق سرعت |
| موتور سنکرون با آهنربای دائم (PMSM) | راندمان بالا، گشتاور ویژه بهتر، سایز و جرم کمتر | هزینه اولیه بالاتر، حساسیت به دما و گشتاور گذرا |
| موتور سروو / کنترل برداری | کنترل دقیق حرکت، پاسخ دینامیکی بالا، مناسب برای مصارف لوکس یا حمل بار دقیق | پیچیدگی سیستم کنترل و هزینه نگهداری بالاتر |
تحلیل بار ضربهای و شرایط بحرانی
روشهای شناسایی و مقابله با پیکهای بار
در تحلیل پیکهای بار باید سناریوهای متفاوتی شبیهسازی شوند: راهاندازی با بار کامل، توقف اضطراری هنگام شتاب بالا، و برخوردهای ناگهانی. مدلهای غیرخطی انتقال نیرو و تغییرات هندسی باید لحاظ شوند تا نقاط بحرانی که میتوانند منجر به بروز کشیدگی سیم بکسل یا یاتاقانها شوند مشخص گردد. اقدامات مهندسی شامل طراحی حفاظت اضافهبار، انتخاب سیستم ترمز با ظرفیت جذب انرژی بالا و بهکارگیری سیستمهای بازتولید انرژی هنگام ترمز است. همچنین در ساختمانهای بلند، پدیدههای متقابل بین آسانسورهای موازی و اثرات مکانیکی مشترک بر سازه باید تحلیل شود.
برای مشاهده مشخصات و سفارش خدمات بالابر فروشگاهی به صفحه بالابر فروشگاهی در کرج مراجعه کنید.
تأثیر درایوهای کنترل فرکانس و استراتژیهای کنترلی
مزایا و ملاحظات کنترل VVVF و برداری
درایوهای کنترل فرکانس متغیر (Variable Voltage Variable Frequency – VVVF) یکی از مهمترین پیشرفتها در فناوری آسانسورهای مدرن محسوب میشوند. این سیستمها با تغییر همزمان ولتاژ و فرکانس تغذیه موتور، امکان کنترل دقیق سرعت و گشتاور را فراهم میسازند. درایوهای VVVF موجب حذف شوکهای الکتریکی و مکانیکی هنگام راهاندازی و توقف شده و بدین ترتیب عمر مفید قطعات مکانیکی مانند گیربکس و یاتاقانها را افزایش میدهند.
علاوه بر این، با تنظیم تدریجی ولتاژ خروجی و کنترل زاویه فاز، جریان راهاندازی به میزان قابل توجهی کاهش مییابد که تأثیر مستقیمی در کاهش افت ولتاژ و کاهش بار لحظهای بر شبکه تغذیه دارد. از منظر بهرهوری، استفاده از این درایوها تا ۳۰٪ صرفهجویی انرژی را در ساختمانهای پرترافیک به همراه دارد، زیرا انرژی جنبشی در حالت ترمز به صورت بازتولیدی به شبکه بازگردانده میشود.
کنترل برداری (Field-Oriented Control – FOC) یک استراتژی پیشرفتهتر نسبت به کنترل اسکالر (V/f Control) است که با تفکیک مولفههای جریان میدان و گشتاور، امکان تنظیم مستقل و لحظهای هر دو را فراهم میکند. در نتیجه، موتور میتواند گشتاور ثابت را در محدوده وسیعی از سرعتها حفظ کند و واکنش سریعتری نسبت به تغییر بار نشان دهد. این قابلیت بهویژه در آسانسورهای مسکونی با توقفهای متعدد و بار متغیر، اهمیت زیادی دارد.
در این روش، استفاده از سنسورهای موقعیت (Encoder) یا تخمینزنهای برداری دیجیتال برای شناسایی موقعیت دقیق میدان مغناطیسی ضروری است. کنترل برداری همچنین باعث کاهش نوسانات تراز (Leveling Fluctuation) و ارتقای تجربه حرکتی نرمتر برای سرنشینان میشود. از دید طراحی، این روش نیازمند درایوهای قدرتمند DSP و پردازندههای بلادرنگ است که بتوانند مدل دینامیکی موتور را با دقت بالا پیادهسازی کنند.
با وجود تمام مزایای فوق، طراحی و استفاده از سیستمهای کنترل فرکانس متغیر نیازمند توجه دقیق به ملاحظات فنی متعددی است. نخست، کیفیت توان ورودی باید تضمین شود زیرا درایوهای VVVF باعث ایجاد اعوجاج هارمونیکی در جریان شبکه میشوند که میتواند بر تجهیزات دیگر تأثیر منفی بگذارد. بنابراین، استفاده از فیلترهای هارمونیکی و چوکهای ورودی (Input Reactors) الزامی است. دوم، نویز الکترومغناطیسی (EMI) ناشی از کلیدزنی سریع ترانزیستورها باید با کابلکشی مناسب، شیلدینگ، و زمینسازی استاندارد کنترل شود.
سوم، سیستم باید از لحاظ حرارتی پایدار باشد، زیرا کلیدزنی فرکانس بالا منجر به تلفات اضافی در نیمههادیها میگردد. در نهایت، انتخاب صحیح پارامترهای کنترل پیشبینیکننده (Model Predictive Control – MPC) یا استفاده از کنترل تطبیقی (Adaptive Control) میتواند کارایی سیستم را در شرایط بار متغیر به میزان قابل توجهی افزایش دهد و نوسانات ترمز یا شروع حرکت را به حداقل برساند.
برای مشاهده مشخصات و یا درخواست خدمات تعمیر بالابر به صفحه تعمیر بالابر درکرج مراجعه کنید.
مزایای کلیدی استفاده از درایو VVVF
۱. کاهش جریان راهاندازی و حذف شوکهای مکانیکی در شروع حرکت.
۲. افزایش بازده کلی سیستم از طریق بازیافت انرژی در هنگام ترمز.
۳. فراهم کردن شتاب و ترمز نرم برای بهبود راحتی مسافر.
۴. افزایش طول عمر اجزای مکانیکی و کاهش نیاز به سرویسهای مکرر.
ملاحظات طراحی و فنی مهم
۱. کنترل دقیق هارمونیکها با استفاده از فیلترهای EMC و چوکهای ورودی.
۲. انتخاب صحیح درایو با ظرفیت جریان مناسب و سیستم خنککاری مؤثر.
۳. تنظیم پارامترهای کنترلگر (Gain Scheduling) بر اساس نوع بار و سرعت.
۴. تضمین همزمانی بین درایو و سیستم کنترل مرکزی برای جلوگیری از تاخیر حرکتی.
الگوریتمهای کنترلی پیشرفته
در نسل جدید آسانسورها، ترکیب الگوریتمهای کنترل برداری با کنترل پیشبینیکننده مدل (MPC) یا کنترل مستقیم گشتاور (DTC) مورد استفاده قرار میگیرد. این رویکردها موجب کاهش تاخیر پاسخ، افزایش پایداری حلقه بسته و دستیابی به کنترل دقیقتر سرعت در شرایط بار متغیر میشوند. درایوهای هوشمند نیز قادرند دادههای عملکردی را ثبت کرده و از طریق تحلیل داده، پارامترهای کنترلی را بهصورت خودکار بازتنظیم نمایند. این موضوع مسیر را برای پیادهسازی نگهداری پیشبین و سیستمهای خودتنظیم در آینده هموار میکند.
برای مشاهده مشخصات و سفارش قطعات بالابر به صفحه قطعات بالابر در کرج مراجعه کنید.
مسئله نویز و ارتعاش: تحلیل و راهکارها
منابع و روشهای کاهش صدا و ارتعاش
منابع اصلی نویز شامل ارتعاشات موتور، گیربکس، مجموعه پولی/درام و کابلهای شلی شده است. کاهش نویز مستلزم تحلیل مودال سازههای متصل، انتخاب یاتاقانها و تکیهگاههای با قابلیت میرایی، و کنترل سرعت و شتاب از طریق پروفایلهای نرم است. در طراحی پیشرفته، تحلیل انتقال صدای هوا (airborne) و ساختار (structure-borne) بهصورت همزمان انجام میشود تا نقاط تقویت صدا مشخص و با استفاده از مواد میرای مناسب یا تکیهگاههای ارتعاشی اصلاح شوند. معیارهای کاربری و استانداردهای مربوط به سطح صدای مجاز باید همواره در طراحی لحاظ شوند.
نگهداری پیشبین (Predictive Maintenance) و سنسورینگ
شاخصها و پارامترهای مؤثر برای نگهداری پیشبین
برای نگهداری پیشبین باید پارامترهایی مانند دما و جریان سیمپیچی، ارتعاش سازهای، کاهش بازده، و الگوهای مصرف انرژی پایش شوند. تحلیل فرکانسی سیگنال ارتعاش و تشخیص تغییرات کوچک در هارمونیکهای جریان میتواند نشانه آغاز خرابی بلبرینگ یا نامتعادلی در شافت باشد. پیادهسازی سامانههای جمعآوری داده و تحلیل مبتنی بر یادگیری ماشین این امکان را فراهم میکند که پنجرههای سرویس بهینه شوند و زمان توقف برنامهریزیشده کاهش یابد. یک استراتژی خوب ترکیبی از مانیتورینگ آنلاین و بازدیدهای دورهای است.
برای دریافت اطلاعات بیشتر به صفحه اصلی شرکت آرشه مراجعه کنید.
ملاحظات اقتصادی و تحلیل چرخه عمر
تحلیل هزینه کل مالکیت (TCO) و معیارهای اقتصادی
تحلیل اقتصادی باید شامل هزینه سرمایهای اولیه، هزینه نصب، مصرف انرژی پیشبینیشده، هزینههای نگهداری، و نیز هزینههای ناشی از ازکارافتادگی سیستم باشد. راهحلهایی که هزینه سرمایه اولیه بالاتری دارند اما راندمان انرژی بیشتری ارائه میدهند (مثلاً PMSM با درایو کنترل برداری) ممکن است در دوره چرخه عمر اقتصادیتر باشند. تحلیل حساسیت باید پارامترهای کلیدی مانند قیمت انرژی، نرخ بهره و برنامه نگهداری را در بر گیرد تا ریسک پروژه به دقت تعیین شود.
مطالعات موردی و نمونه محاسبات کاربردی
نمونه محاسبه: ساختمان ۲۰ طبقه با بار متغیر
در این نمونه باید ابتدا بار عملیاتی میانگین، بار اوج، نسبت استفاده همزمان (diversity factor) و پروفایل سفر (short-run/long-run) تعیین شود. سپس ممان اینرسی کابین و وزنه، نسبت گیربکس و قطر پولی محاسبه میشوند تا گشتاور و توان مورد نیاز در حالتهای مختلف بدست آید. در مرحله بعدی، بررسی سازگاری با درایو انتخاب شده و تحلیل حرارتی موتور انجام میشود. شبیهسازی زمانی حرکت میتواند نقاط توقف و تراز را پیشبینی کند و بر اساس آن تنظیمات کنترلگر PID یا الگوریتم برداری بهینه شوند. نتایج باید شامل نمودارهای شتاب-زمان، جریان-زمان و پروفایل دمایی باشند تا تصمیمگیری نهایی صورت گیرد.
توصیههای مهندسی و روندهای آینده
چشمانداز فنی و پیشنهادات اجرایی
روند حرکت بهسمت استفاده گستردهتر از موتورهای سنکرون با آهنربای دائم و کنترل برداری است، بهویژه در پروژههایی که به بازده و فشردگی فضا حساسند. پیشنهاد میشود در پروژههای جدید: ۱) مدلسازی دقیق ممان اینرسی انجام شود، ۲) معیارهای نگهداری پیشبین پیادهسازی گردد، ۳) تحلیلهای اقتصادی با دوره زمانی حداقل ۱۵ سال صورت گیرد، و ۴) طراحی کنترل برای کاهش نوسانات تراز و بهینهسازی مصرف انرژی بهعنوان بخشی از مشخصات فنی خریداران درج شود.